仿射变换
Contents
仿射变换#
本文是对《机器学习数学基础》第2章2.2.4节齐次坐标系的内容拓展。
名称的来源#
仿射,是英文单词 affine 的中文翻译。
单词 affine,读音:[ə’faɪn]。来自于英语 affinity。英语词根 fin 来自于拉丁语 finis,表示“边界,末端”,例如finish、final 等单词。词头 ad 表示“去,往”,拼出名词 affinity,本意为“接壤,结合”,用来指“姻亲,由于婚姻而产生的亲戚关系”,引申为“亲密关系,相似性”等\(^{[1]}\)。
中文名称“仿射”,有一种观点是音译,来自“affine geometry”中的“fine”和“geo”两部分,于是“仿射几何”就翻译出来了\(^{[2]}\)。
变换#
对于几何图形,经常会有一些平移、旋转、缩放等形式的变换,如下图所示\(^{[3]}\) :
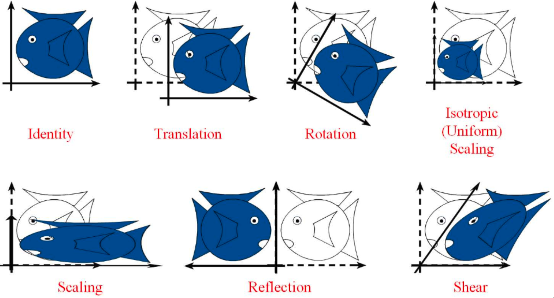
平移,translation
旋转,rotation
平移和旋转,图形的形状(面积或体积)不变,也称为刚体变换(rigid transformation)或欧几里得变换(Euclidean transformation)。
缩放,scaling。如果每个坐标方向的缩放系数相同(即各向同性,isotropic),则为 uniform scaling
反射,reflection,关于某坐标轴对称。反射也可以看成是缩放的一个特例。
平移、旋转和各向同性的缩放,统称为相似变换(similarity transformation)。
剪切变换,shear mapping
下图显示了相似变换、线性变换的概念所涵盖的变换方式\(^{[4]}\) 。
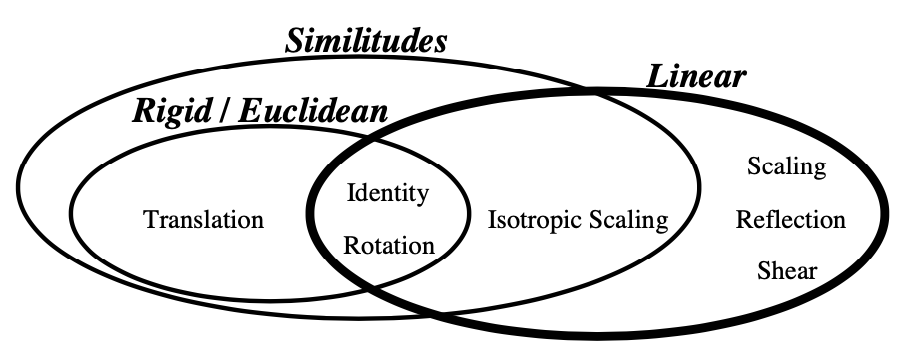
在线性代数中所研究的线性变换(参阅《机器学习数学基础》第2章2.2节),包括:
旋转
反射
剪切
各向同性或者不同性的缩放
以上变换的组合,也是线性变换。线性变换遵循着加法和乘法封闭原则,即:
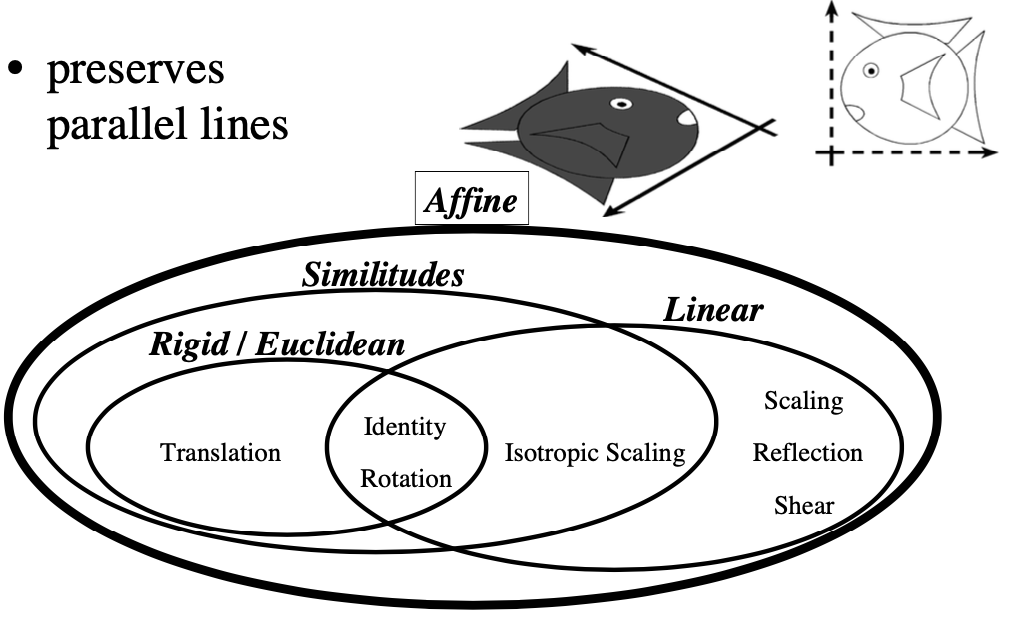
但是,平移不是线性变换(《机器学习数学基础》第2章2.2.1节)。如果将上述的线性变换与平移合并起来,则称为 affine transformation,翻译为仿射变换\(^{[4]}\)。
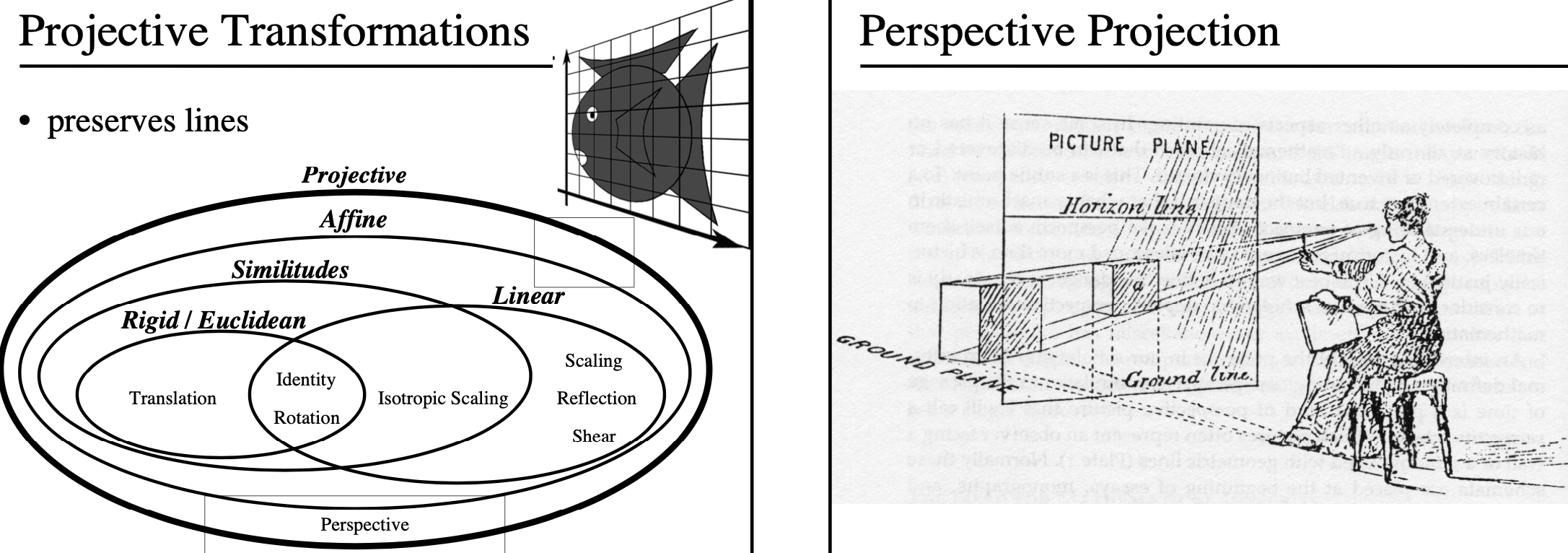
变换的范围还可继续扩大,那就是射影变换(projective transformation)\(^{[4]}\)。
本文重点探讨仿射变换。
仿射空间#
仿射空间(affine space),又称线性流形,是数学中的几何结构,这种结构是欧式空间的仿射特性的推广\(^{[5]}\)。
在仿射空间中,点与点之间的差即为向量,点与向量的加法可以得到另一个点,但是点与点之间不可以相加。
仿射空间中没有特定的原点,因此不能将空间中的每一点和特定的向量对应起来。仿射空间中只有从一个点到另一个点的位移向量,或称平移向量。
如果 \(\mathbb X\) 是仿射空间,\(\pmb{a},\pmb{b}\in\mathbb{X}\) ,那么从 \(\pmb{a}\) 到 \(\pmb{b}\) 的位移向量为 \(\pmb{b} − \pmb{a}\) 。
所有向量空间都可看作仿射空间。
若 \(\mathbb{X}\) 是向量空间,\(\pmb{L}\in\mathbb{X}\) 是向量子空间,\(\pmb{a}\in\mathbb{X}\) ,则 \(\pmb{a}+\pmb{L}=\{a+l:l\in\pmb{L}\}\) 是仿射空间。这里的 \(\pmb{a}\) 也称为平移向量。
若向量空间 \(\mathbb{X}\) 的维度是 \(n\lt\infty\) ,那么 \(\mathbb{X}\) 的仿射子空间也可看作一组非齐次线性方程的解;而齐次方程的解永远是线性子空间,也就是说齐次方程的解永远包含零解。维度为 \(n − 1\) 的仿射空间也叫做仿射超平面。
仿射变换#
仿射变换(affine transformation),又称仿射映射,是对一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。即:
平移变换不能用矩阵表示,为此使用齐次坐标系(《机器学习数学基础》第2章2.2.4节)。
仿射变换的性质#
设 \(f(\pmb{x})=\pmb{Ax}+\pmb{b}\) 是一个仿射变换,则 \(f\) 具有:
直线到直线的映射
原来平行的直线变换之后仍然平行
证明
设直线 \(l:\pmb{p}+t\pmb{u},t\in\mathbb{R}\) ,则:
\[ f(\pmb{p}+t\pmb{u})=\pmb{A}(\pmb{p}+t\pmb{u})+\pmb{b}=(\pmb{Ap}+\pmb{b})+t(\pmb{Au})=\pmb{p}_1+t\pmb{u}_1 \]其中 \(\pmb{p}_1=\pmb{Ap}+\pmb{b}\) ,\(\pmb{u_1}=\pmb{Au}\) ,则 \(f(l)=l_1, l_1:\pmb{p}_1+t\pmb{u}_1,t\in\mathbb{R}\) 仍然是直线。
设 \(l:\pmb{p}+t\pmb{u}\) 和 \(m:\pmb{q}+t\pmb{v}\) 是平行线,则 \(\pmb{v}=k\pmb{u},k\in\mathbb{R}\) ,所以:
\[\begin{split} \begin{split} f(\pmb{p}+t\pmb{u})&=\pmb{A}(\pmb{p}+t\pmb{u})+\pmb{b}=(\pmb{Ap}+\pmb{b})+t(\pmb{Au})=\pmb{p}_1+t\pmb{u}_1 \\ f(\pmb{q}+t\pmb{v})&=f(\pmb{q}+t(k\pmb{u}))\\&=\pmb{A}(\pmb{q}+t(k\pmb{u}))+\pmb{b}\\&=(\pmb{Aq}+\pmb{b})+t(\pmb{A}k\pmb{u)}\\&=\pmb{q}_1+t(k\pmb{u}_1) \end{split} \end{split}\]故,变换之后所得 \(l_1:\pmb{p}_1+t\pmb{u}_1\) 与 \(m_1:\pmb{q}_1+t(k\pmb{u}_1)\) 仍然平行。
计算工具#
如果对图形进行仿射变换,以下列举两个示例。
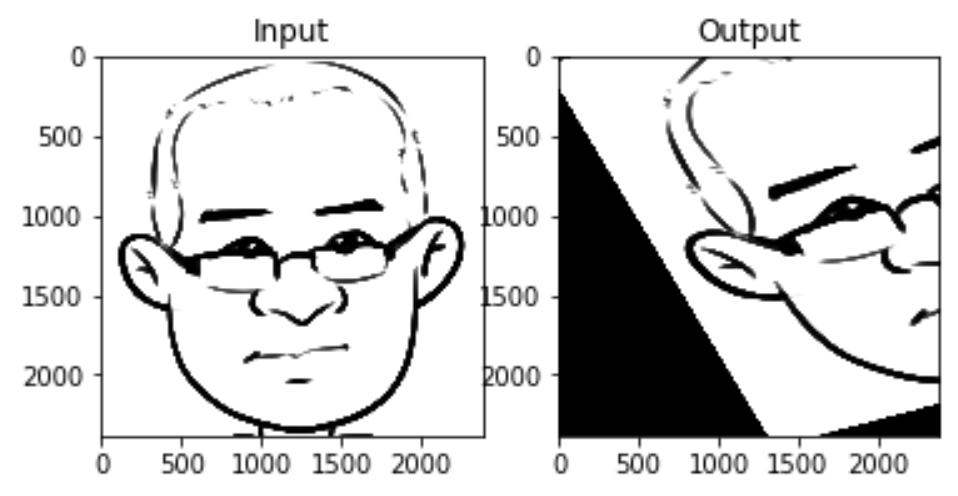
1. OpenCV
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('headpic.png')
rows, cols, ch = img.shape
pts1 = np.float32([[50, 50],
[200, 50],
[50, 200]])
pts2 = np.float32([[10, 100],
[200, 50],
[100, 250]])
# 构造对应点变换矩阵
M = cv2.getAffineTransform(pts1, pts2)
dst = cv2.warpAffine(img, M, (cols, rows))
plt.subplot(121)
plt.imshow(img)
plt.title('Input')
plt.subplot(122)
plt.imshow(dst)
plt.title('Output')
plt.show()
输出图像
2. 仿射变换模块
Affine_transform:
pip install affine-transformAffine:
pip install affine,github仓库地址:https://github.com/sgillies/affine
参考文献#
[1]. tetradecane. https://www.zhihu.com/question/345279684/answer/819134982
[2]. 关于仿射这个词有什么通俗易懂的解释吗?. https://www.zhihu.com/question/368556037/answer/990194830
[3]. https://www.cnblogs.com/shine-lee/p/10950963.html
[4]. http://www.cs.tau.ac.il/~dcor/Graphics/cg-slides/trans3d.pdf